
毕节市1762-IF4PLC模块可编程序控制器
1756-A10 1756-A13 1756-A17 1756-A4 1756-A7 1756-BA1 1756-BA2 1756-BATA | 1756-IF16 1756-IF16H 1756-IF8 1756-IF8H 1756-IF8I 1756-IF6I 1756-IF6CIS 1756-IT6I
| 1756-L83E 1756-L83ES 1756-L84E 1756-L84ES 1756-L85E 1756-L8SP 1756-M02AE 1756-M02AS
| IC200MDD849 IC200TBX420 IC200UER508 IC200PWR001 IC200TBX023 IC200TBX110 IC200ALG261 IC200ALG325 |
1756-CN2 1756-CN2R 1756-CNB 1756-CNBR 1756-DHRIO 1756-DNB 1756-EN2T 1756-EN2TR 1756-EN3TR 1756-ENBT 1756-ENET 1756-EWEB | 1756-IR6I 1756-IR12 1756-IRT8I 1756-IT6I2 1756-IM16 1756-L61 1756-L62 1756-L63 1756-L64 1756-L65 1756-L71 1756-L71S
| 1756-M03SE 1756-M08SE 1756-M16SE 1756-N2 1756-OA16 1756-OA16I 1756-OB16D 1756-OB16E 1756-OB16I 1756-OB32 1756-OF4 1756-OF8
| 1756-BATA 1756-CNB 1756-IC16 1756-IB16 1756-IB32 1756-IF16 1756-IR61 1734-ACNR 1734-ADN 1734-AENT 1734-AENTR 1734-APB
|
1756-HSC 1756-IA16 1756-IA16I 1756-IA32 1756-IB16 1756-IB16D 1756-IB16I 1756-IB32 1756-TBS6H 1756-TBSH 1757-SRM | 1756-L72S 1756-L73 1756-L74 1756-L75 1756-L81E 1756-L81ES 1756-L82E 1756-L82ES 1756-RM2 1756-TBCH 1756-TBNH
| 1756-OF8I 1756-OW16I 1756-OF6VI 1756-OF6CI 1756-PA72 1756-PA75 1756-PA75R 1756-PB72 1756-PB75 1756-RM
| 1746-IA16 1746-IB16 1746-IB32 1746-IM16 1746-IO12DC 1746-ITB16 1746-IV16 1746-IV32 1746-N2 1746-NI16I 1746-NI4
|
1734-IA2 1734-IA4 1734-IB2 1734-IB4 1734-IB4D 1734-IB8 1734-IB8S 1734-IE2C 1734-IE2V
| 1734-IE4S 1734-IE8C 1734-IJ 1734-IK 1734-IM2 1734-IM4 1734-IR2 1734-IR2E 1734-IT2I
| 1734-IV4 1734-IV8 1734-OA2 1734-OA4 1734-OB2 1734-OB2E 1734-OB2EP 1734-OB4 1734-OB8 | 1746-NI8 1746-NIO4I 1746-NIO4V 1746-NO4V 1746-NO4I 1746-NO8I 1746-OV16 1746-OV32 1746-OW16 |
毕节市1762-IF4PLC模块可编程序控制器
.通过虚拟开发技术提升智能制造装备开发效率问题
结合基于模型和数字孪生的概念,可以构建虚拟开发环境,从而摆脱对物理样机的需求,显著缩短智能制造装备的开发时间,并针对各种极端工况提供可靠的验证。本问题计划以工业机器人离线编程为切入点,探索和实践智能制造装备虚拟开发的新路径。
国内在离线编程仿真(见图4)方面研究起步较晚,技术存量较薄弱,自主、通用系统缺乏,已有应用多基于国外组件开发,存在断供风险。
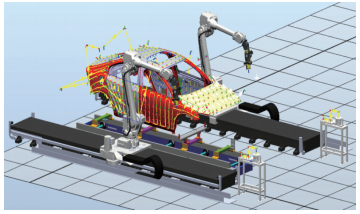
图4 离线编程仿真
国内离线编程仿真软件在一些人机交互功能的便捷性、特种工艺的兼容性、海量设备的支撑性以及大规模模型渲染的实时性上存在一些不足,与国外软件的差距具体体现在以下几个方面。
1)复杂焊接轨迹规划。美国的林肯电气推出的proFIT软件,可以做到自动化的焊接轨迹生成,并且轨迹生成的时间控制在5min以内,且相关轨迹模板和焊接工艺参数能够自动固化到生成的焊接轨迹当中,国内软件在焊接轨迹规划方面的能力与之相比还有一定差距。
2)渲染性能。在大场景的渲染能力方面还难以做到亿级面片的场景渲染,尤其是在多机器人焊接场景下的仿真,仍需要继续提高处理大规模模型渲染效率。
3)碰撞检测性能。加拿大的RobotMaster可以做到实时的碰撞检测,并且在轨迹优化界面就可以做到,实现碰撞点、不可达及奇异点等多重错误的快速检测,国内软件的碰撞检测功能则还需与轨迹优化功能集成。
4)焊接效果仿真。芬兰的Delfoi可以做到焊接的飞溅效果仿真,目前国内软件还不能支持这类效果仿真。
5)海量机器人库。加拿大的 RoboDK 支持全球50多个机器人品牌的上百种型号的机器人,还支持包括scara、delta、3p3r等在内的20多种机器人构型,较国内软件优势明显。
针对上述不足,需要从高性能3D显示引擎、模型轻量化浏览、几何算法引擎、复杂路径智能规划技术及动力学引擎等技术点上进行重点攻关。
通过数字化技术构建产品和设备模型,在虚拟环境中进行虚拟验证和测试,实现产品的快速交付和迭代优化,将显著减少试错成本、缩短开发周期、控制测试风险,使需要繁复计算和反复调参的关键工艺设计变得有据可依,且能够以可视化的形式快速、立体地呈现生产线现场状态,使工艺方案可行与否一目了然。虚拟开发技术在复杂智能制造装备制造中起着化繁为简的作用,将从根本上推动制造模式从体力密集型向智力密集型转变。
毕节市1762-IF4PLC模块可编程序控制器